
Newton’s Second Law of Motion
Solved Problems
Example 1.
A body begins to fall from a height
Solution.
There are two forces acting on the body (Figure
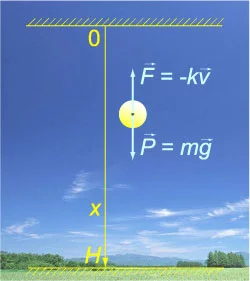
We direct the
Considering the projection on the
This problem is a variation of Case
First we find the velocity
Separating the variables, we have
Here,
We integrate again:
Assume that the body reaches the Earth's surface at
The value of
The resulting approximate dependence of
- freely falling body in the gravitational field without air resistance (the blue curve
- exact solution of the nonlinear algebraic equation for

It is seen from these graphs that the air resistance force compensates the force of gravity in a few seconds after the start of the drop. After that, the motion of the body becomes uniform. Therefore, when falling from a large height (in this example, more than
Example 2.
At the initial moment, a chain of length
Solution.
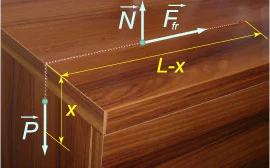
The movement of the chain is completely determined by two variable forces:
- the force of gravity
- the friction force
According to Newton's second law, the differential equation of motion of the chain has the form:
We got a second order nonhomogeneous differential equation with constant coefficients. Let us solve this equation. First we consider the associated homogeneous equation:
The roots of the characteristic equation have the following values:
Then the general solution of the homogeneous equation can be written as
We define the constants
We now construct a particular solution of the nonhomogeneous equation. The right side is a constant expression, so we seek a particular solution in the form of a constant number:
Thus, the general solution of the inhomogeneous equation has the form:
Consider the initial conditions and determine the coefficients
It follows that the length of the hanging part of the chain at equilibrium is
By the condition of the problem, at the initial time the chain gets an additional shift
Now we can calculate the coefficients
Hence, the sliding of the chain is described by
The chain slips off the table at time
The expression for
Denoting
Here we only take the root with
Hence, the solution is given by
Interestingly, the time of sliding
